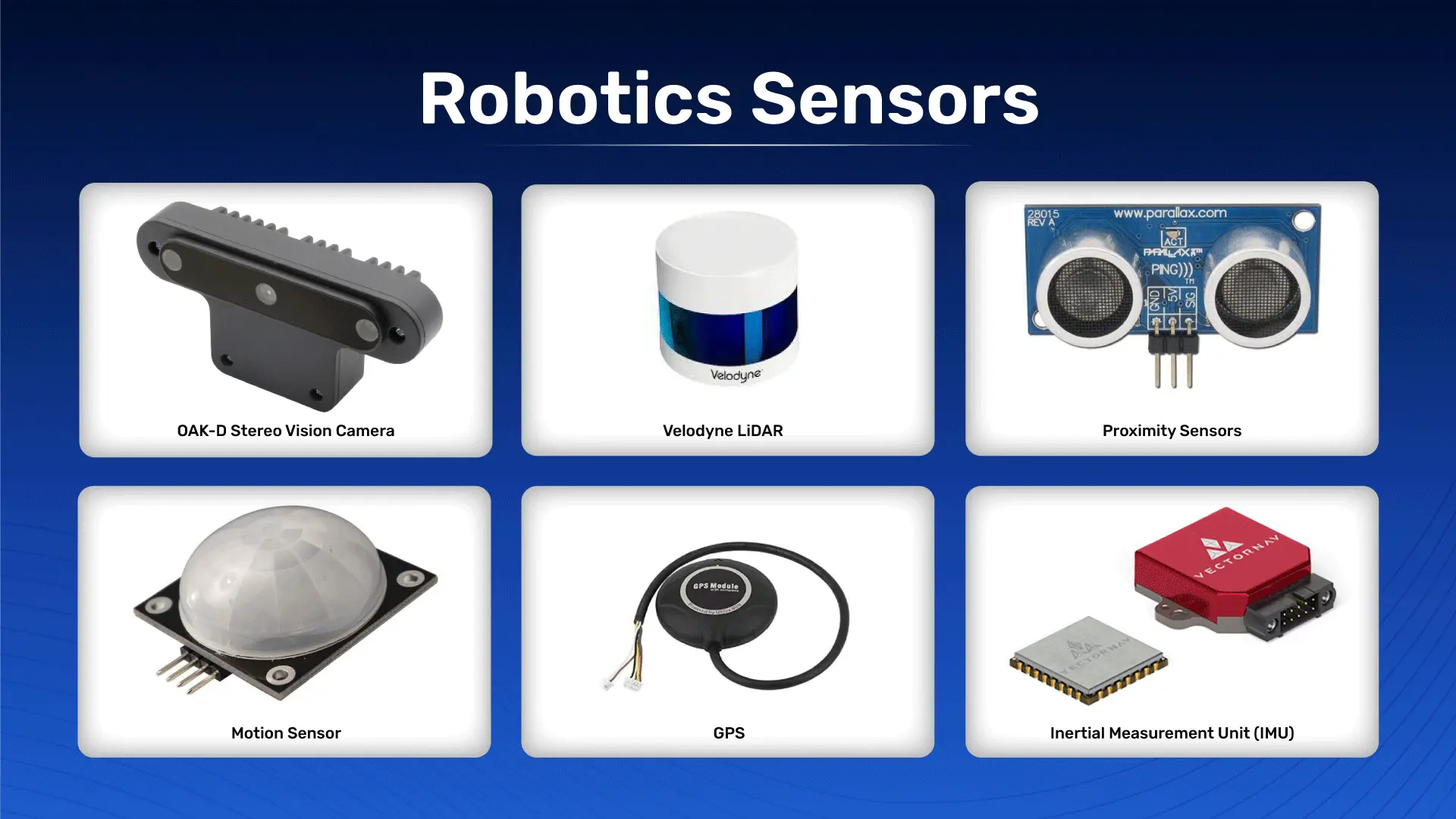
Sensors
Robots use a variety of sensors to perceive their environment and gather data about their surroundings, including cameras, lidar, proximity sensors, and touch sensors.
Controller
This is the robot's "brain," which takes input from sensors and uses software to process the information and send commands to the actuators.
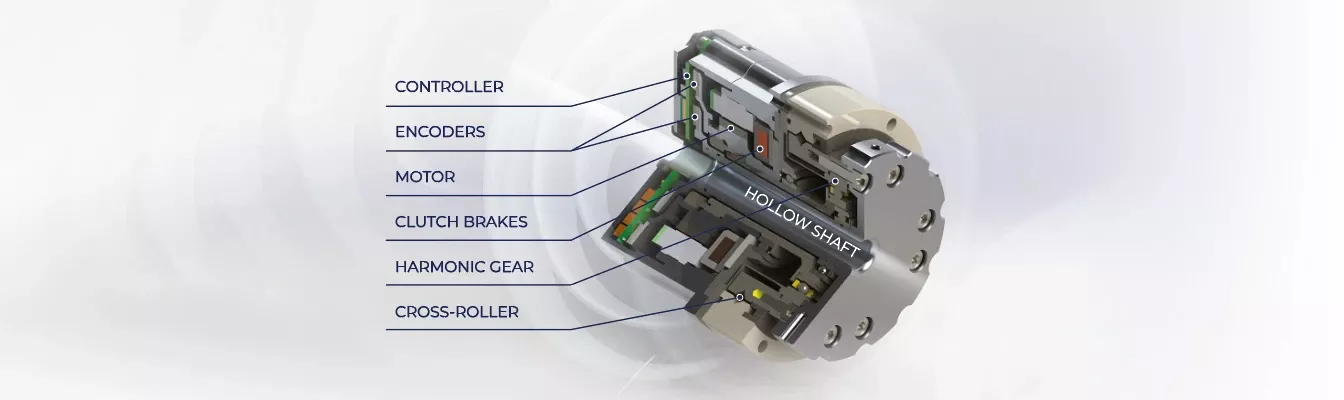
Actuators
These are the components that produce motion, acting like a robot's muscles. They convert energy from the power supply into physical movement for parts like limbs or wheels.
Power Supply
A power source, such as a battery or a direct electrical connection, is needed to provide energy to all therobot's components.

Structure/Chassis
The physical frame provides support and protection for the robot's internal components and ensures stability.